
Hız Kontrol Cihazları
HIZ KONTROL CİHAZLARI
Bir motorun dönüş hızı, bu motoru besleyen güç kaynağının frekansı ve bu motordaki kutup sayısına bağlıdır. Motordaki kutup sayısı donanımla ilişkili olduğundan dolayı değiştirilmesi, sökülüp çıkartılması oldukça zordur. Öte yandan eğer şebekeden gelen elektriğin frekansı değiştirilirse motorun dönüş hızı da istenilen oranda ayarlanmış olacaktır. Güç üreten santrallerdeki elektriğin frekansı 50Hz’dir [fo1].
Motorun dönüş hızı= (60 x f) / P
f: frekans
P: kutup sayısı
1.1 ASENKRON MOTORLARIN (INDÜKSİYON) TEMEL KARAKTERİSTİKLERİ
Dönme hızı – tork – akım karakteristikleri, dönüş hızı, tork oranı, sapma, incelenecektir.
1.1.1 Dönme hızı – tork – akım karakteristikleri
Asenkron motorunun iki çeşit karakteristiği vardır. Birincisi “Dönüş Hızı – Tork” ilişkisi, diğeri ise “Dönüş Hızı – Çekilen Akım” ilişkisidir. Alttaki grafikte indüksiyon motorunun torkunun ve akımının dönüş hızına göre değişim grafiği verilmiştir. Motor enerjilendirildiğinde başlangıçtaki durumu, istenilen hıza ulaşma zamanı ve istenilen hızda çalıştığı andaki sabit hızı gibi halleri aşağıdaki grafikte gösterilmiştir.
Motora uygulanan akımın en fazla olduğu yer “başlangıç” durumudur ve çekilen akım bu andan sonra azalacak ve dönüş hızı ise artacaktır. Tork ise dönüş hızı arttığı sürece artacaktır ve dönüş hızının belirli bir değeri aştığı anda tork düşüşe geçecektir. Motora bağlanan yükün torku ile motorun çıkış torku dengeye ulaştığında, motor sabit hızda dönecektir. Motora o andaki çekmesi gereken akım değeri uygulanacaktır.
Motora bağlı yükün değişmesiyle gereksinim duyulan tork değişir. Bununla birlikte motorun çektiği akım ve dönüş hızı değişecektir. Söz konusu olan bu durumdan indüksiyon motorunun temel karakteristik eğrisini çıkarabiliriz.
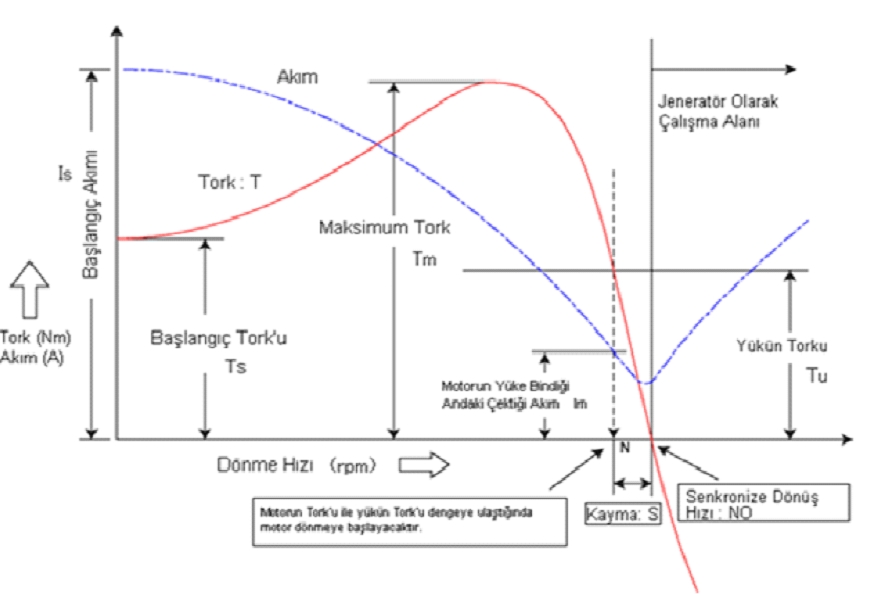
Şekil 1.1: İndüksiyon motordaki dönüş hızı, akım ve tork ilişkisi
1.1.2 İndüksiyon Motorunun Dönüş Hızı
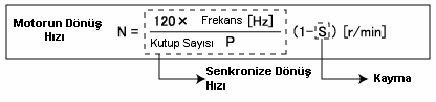
Yük torku devreye girdiğinde, kutup sayısı ve güç kaynağının frekansı motorun dönme hızını etkiler. Bu olay aşağıdaki formülle gösterilmiştir.
1.1.3 İndüksiyon Motorunun Tork Oranı
Motorun dönme halindeki gücüne tork denir. Genelde lineer hareketlerde “N” olarak isimlendirilir. Ancak motorun dönme durumunda ise Tork, dönüş gücünün sebebiyle “Nm” şeklinde isimlendirilir. Motorun Tork’unun oranı aşağıdaki formülle hesaplanır

1.1.4 Sapma
Motora yük bağlandığı zaman, motorun dönme hızı belirli oranda azalacaktır. Dönme hızındaki bu açısal kayma “Sapma” olarak isimlendirilir. Bu sapma oranı aşağıdaki formülle orantılı olur.

* Başlangıç durumunda kayma %100 dür. (Dönme Hızı 0). (Normalde bu olay “Kayma 1” diye tanımlanır.)
* İnverter yardımıyla frekans yavaş yavaş arttırılır. Bu durumda sapma azalır.
* Genelde motora yüklenildiğinde bu sapma %3 ile %5 arasında değişir.
* Yük torku arttırıldığı zaman kayma oranı ve motorun çektiği akım da artacaktır.
* Sapmanın negatif olduğu durumda dönme hızı (N), senkronizeli dönme
hızından (No) daha fazladır. (N>N0)
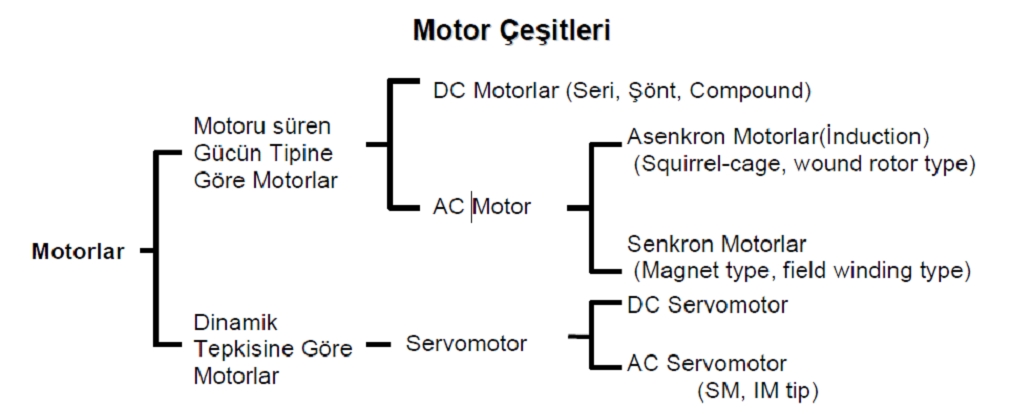
Şekil 1.2: Motor Çeşitleri
1.2 İnverter Sürücüsünün Motor Karekteristiği
Aşağıdaki formül manyetik akı, gerilim ve frekans arasındaki ilişkiyi göstermektedir.
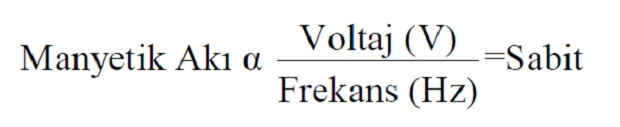
Örnek 1.1: Hız yarı yarıya düştüğü zaman yukarıdaki eşitlikte görüldüğü gibi inverter çıkış voltajı ve frekansı ayarlanır. Sonuçta manyetik akı sabit kalacaktır.
Gerçek çalışmada, motordaki gerilimin düşmesini karşılamak için inverterin düşük frekanstaki gerilimi %150 ile %200 arasında arttırılmalıdır.
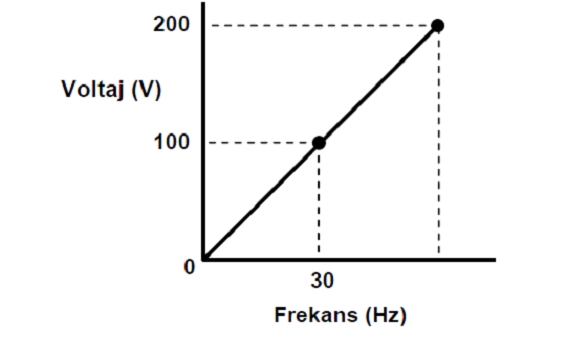 Şekil 1.3: inverterin gerilim frekans ilişkisi
Şekil 1.3: inverterin gerilim frekans ilişkisi
İnverterin çıkış gerilimi güç kaynağının çıkış gerilimini aşamaz. Bundan dolayı 50Hz ve 60Hz frekans aralığında, sabit çıkış voltajı elde edilir.
Aşağıdaki eşitlik motorun üzerine düşen gerilim( V ), motorun frekansı ve torku arasındaki ilişkiyi görmek mümkündür.

Yukarıdaki eşitlikte, akımın aynı olduğu durumda sadece frekans değiştirilirse ters orantıdan dolayı torkun azaldığı görülür.
K sabit sayıdır. Yükün değiştiği durumda akım değişir. Dolayısıyla motorun gerilimi değişir. Manyetik akının sabit kalması için V/f oranının sabit kalması istenir. İnverter bu durumda devreye girer. Gerilimin değiştiği oranda frekansın da değiştirerek manyetik akıyı sabitler. Dolayısıyla motorda sabit bir Tork elde edilir. Buna sabit çıkış alanı adı verilir.